
ひよっこパイロットが撃墜王を目指すmokkyのエースパイロットを見て頂き誠に有難うございます。
今年最初の配信です 本年もよろしくお願いします

モッキー F-16に関しては去年の4月で
チャンネルの最終配信は8月とかなり間が開いちゃったね
本当にごめんなさい 別のチャンネルの方が視聴回数が多いし
こちらは調べたり色々大変な割には視聴者数様が少ないので
ちょっと心が折れちゃったんだけどね
でも 新しい動画が見たいって応援メッセージが入っていたね
そうだね このチャンネルを支えてもらっている登録者様に感謝して、
また作る気力が出ましたので頑張って作っていきます

2025年最初の配信はウクライナ空軍仕様のF-16戦闘機の操作方法を学ぼうという企画の第9弾 今回は空対空戦闘に関する情報をお届けします。
もうウクライナにF-16戦闘機が配備されているけど、
あまり活躍しているって報道は聞かないね
そうだね戦局を挽回するほど機数も揃っていないから仕方ないけど、
今年こそはウクライナに平和が訪れる事を祈ってます
今回は空対空戦闘を行う前にレーダーの見方を中心にお届けしたいと思います。
地味だけどレーダーの見方が分からないと多分空対空戦闘で非常に困ると思うのでしばらくお付き合い頂けると嬉しいです。
空対空戦闘は主に二つのモードがあります。
ひとつは視程外射程ミサイル
BVR Beyond-visual-range用RWSと
近距離空中戦闘機動 Air Combat Mode
という二つのモードがあります。

F-5EタイガーⅡでは無かった念願のAIM-7 スパローを
発射することが出来るようになったね
そうだね だけど初期型のA/B型に搭載されているAN-APG66レーダーは
スパローミサイルのセミアクティブレーダー誘導に必要なCWI 継続波照射機能
が付いていないのでスパローを発射することはできなかったけど

F-16A/B ブロック15でようやくAIM-7スパローの携行が可能になったんだけどスパローはセミアクティブ方式の為レーダーを照射し続けないといけないので

アクティブレーダーシーカーを装備し完全な打ちっぱなし方式になった後継の
AIM-120 アムラームミサイルを発射することが出来ます。
もちろんこのF-16C ブロック50にはAN-APG68レーダーは視程外射程に
対応してありAIM-7スパローではなくてAIM-120 アムラームを携行できます
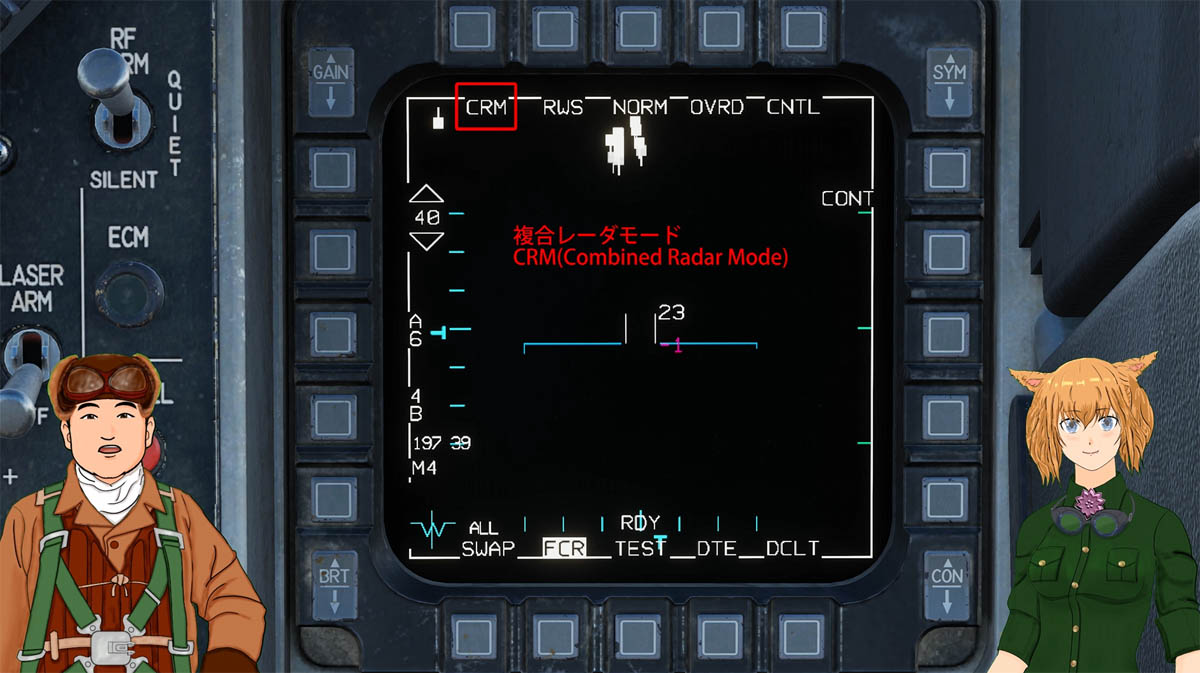
そしてレーダーモードには
複合レーダモード CRM(Combined Radar Mode)と
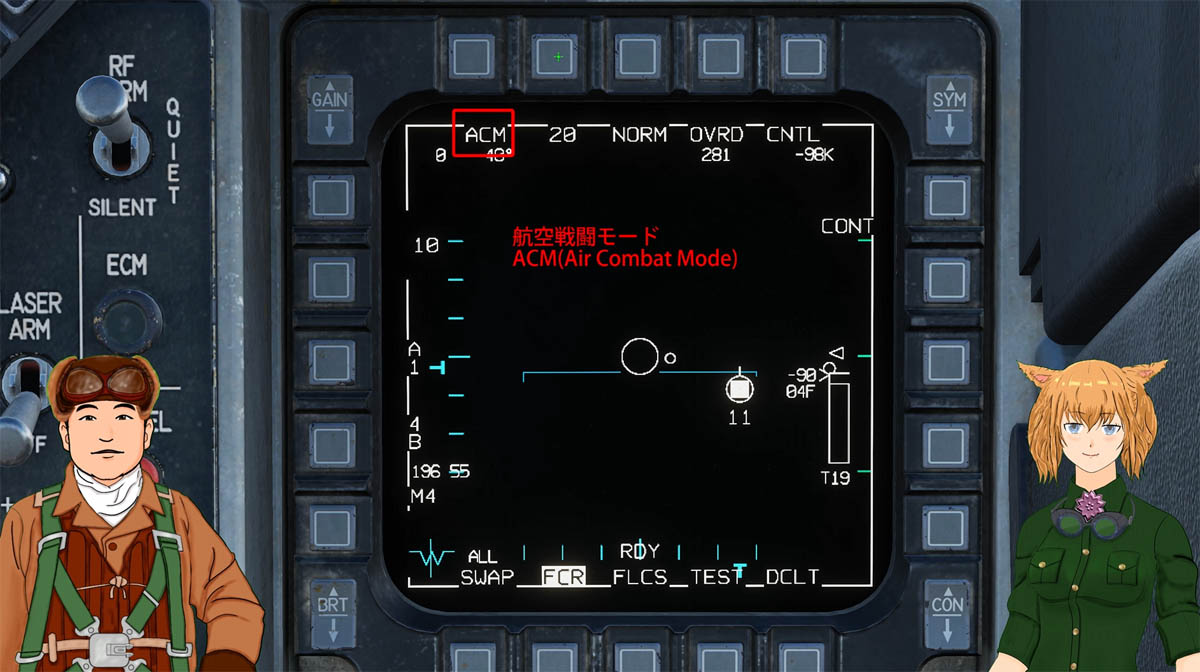
近距離空中戦闘用の
航空戦闘モード ACM (Air Combat Mode)の二つがあります
まずは視程外射程ミサイル
BVRで使うCRMモードを見ていきたいと思います
CRMモードは、電源投入時にデフォルトで選択され
索敵に使用される空対空モードの
1つのインターフェイス に統合されるので
パイロットの作業負荷を軽減するように設計されています。
サブモードには更に二つあります
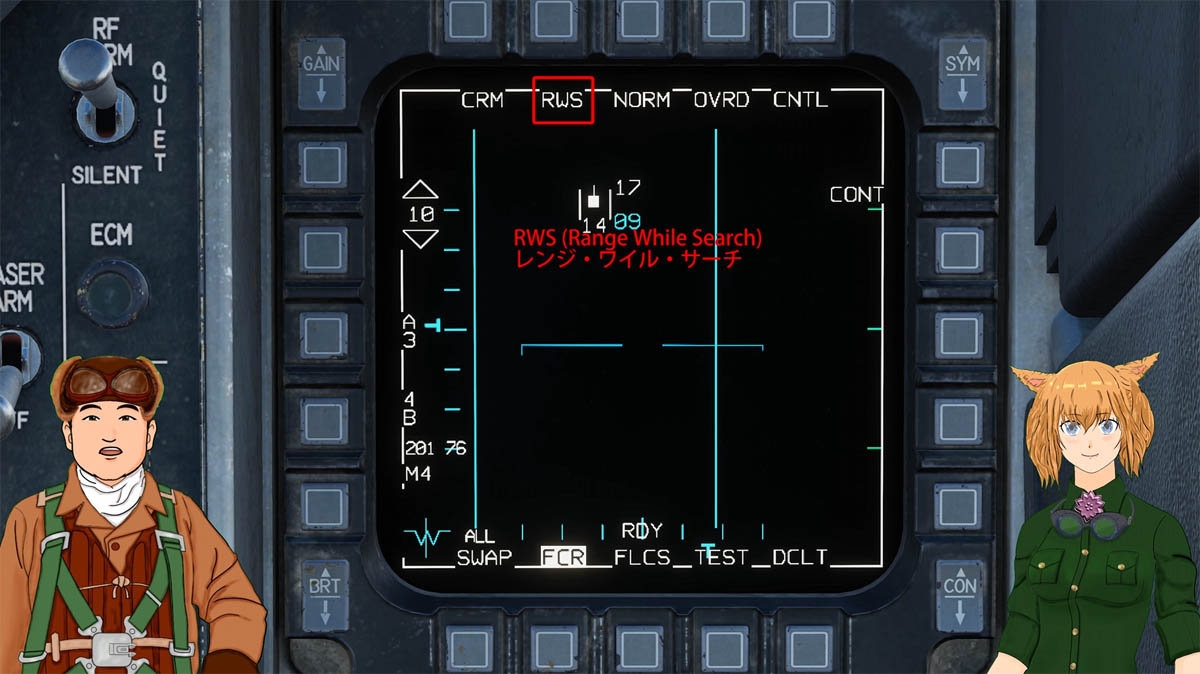
RWS (Range While Search)と
TWS (Track While Scan)の二つのモードを更に見ていきます
RWS (Range While Search)は捕捉範囲10、20、40、80
または160nmに設定し方位角と仰俯角を変更できます
そして特定のトラックを選択してロックするとSTT (Single Target Track)モード
ができます。
そして広範囲での索敵が可能で
すべての方向(機首又は尾部)又はすべての高度(ルックアップ・ルックダウン)の
ターゲット検出が可能です。
ディスプレイには、垂直軸として距離水平軸として方位角が表示されます。
機首にレーダを積んでいるのに何で背後の敵を索敵できるの?
マニュアル・ネット・YouTubeで検索しまくったんだけどRWSで全方向の索敵方法に関して記事を見つけることが出来なかったので分かる人はコメントで書いていただけると助かります

RWSの設定方法はレーダーを有効にするには全てのモード共通でFCR電源スイッチが前(forward)に設定していることを確認します。

次にマスターモードをAA 空対空モードに設定します。
F-16に搭載されているレーダーの有効範囲は70nm 160Km
機体の中心線から左右60度 合計120度をカバーします

このFCRページを表示します
もし 表示されてない場合はこのFCRボタンを押して表示させます

①ボタンがレーダー モードセレクターでデフォルトはCRMになっていますが
もし違うモードになっているようなら
②ボタンを押してCRM 複合レーダモードにします

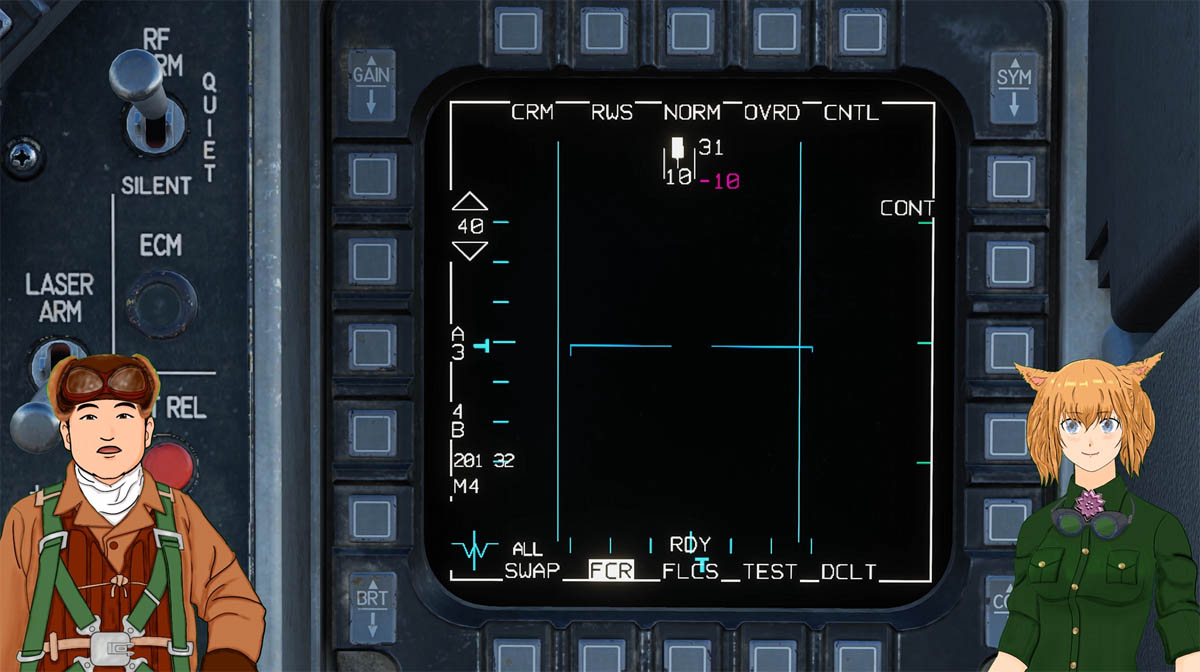
このボタンがレーダーサブモードセレクタでRWSになっていることを確認します
もしモードが違うになったらこのボタンを押してRWSにします。
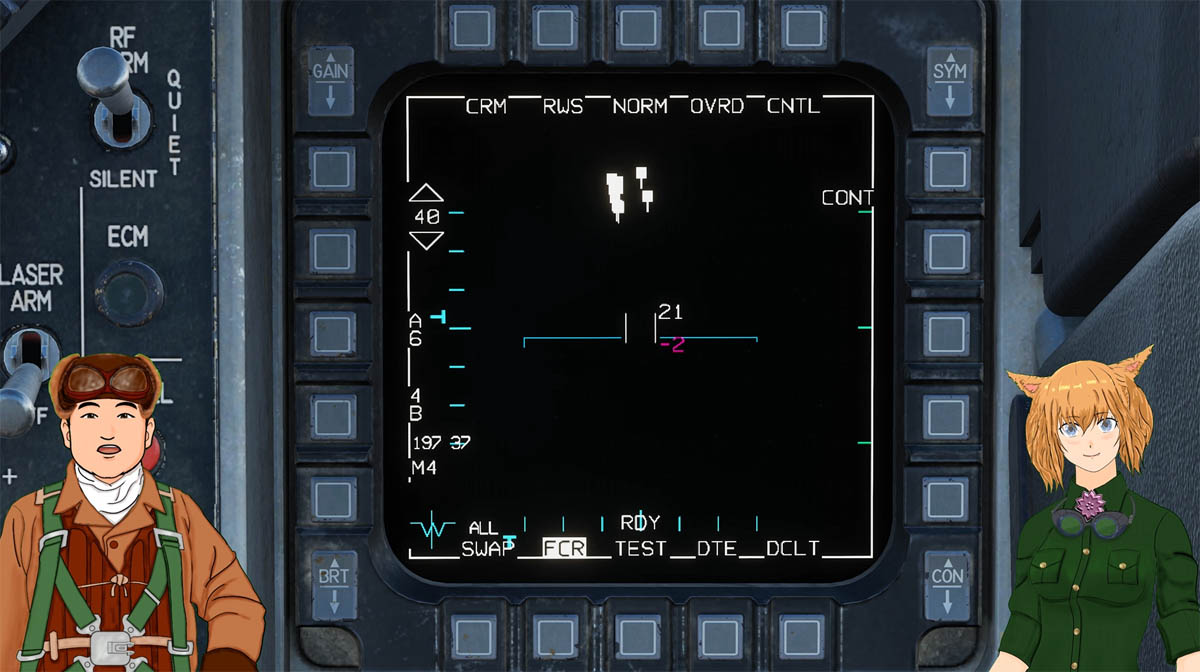
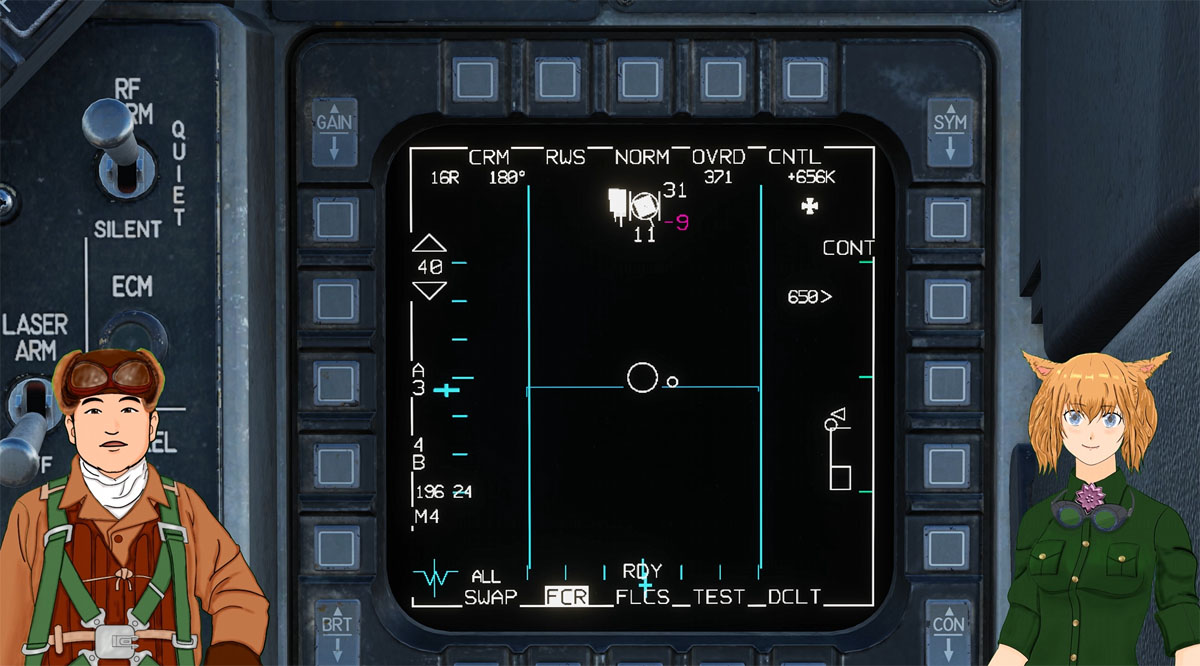
今表示しているのがRWSモードの画面です

レーダーコンタクトで表示されているのがこのマーカーになります

このボタンがレンジスケール基準の増減で5・10・20・40・80・160nmに設定できます

この線が範囲スケールで例えば表示が40nmの場合は
一番下の緑の線が10nm次が20nm・30nmと続き
一番上の線が40nmになります
今レーダーコンタクトを見ると1番上 の緑の線の付近にいますので
30nmあたりにターゲットがいることが分かります

このボタンがレーダのスキャン幅の設定で
A6が60度で左右120度
A3が30度
A1が10度の設定で幅が小さければより早くスキャンが出来ます

あれ?モッキーMIG29 1機のハズが4機に増えたよ
これはこの表示が4Bって書いていあるでしょ
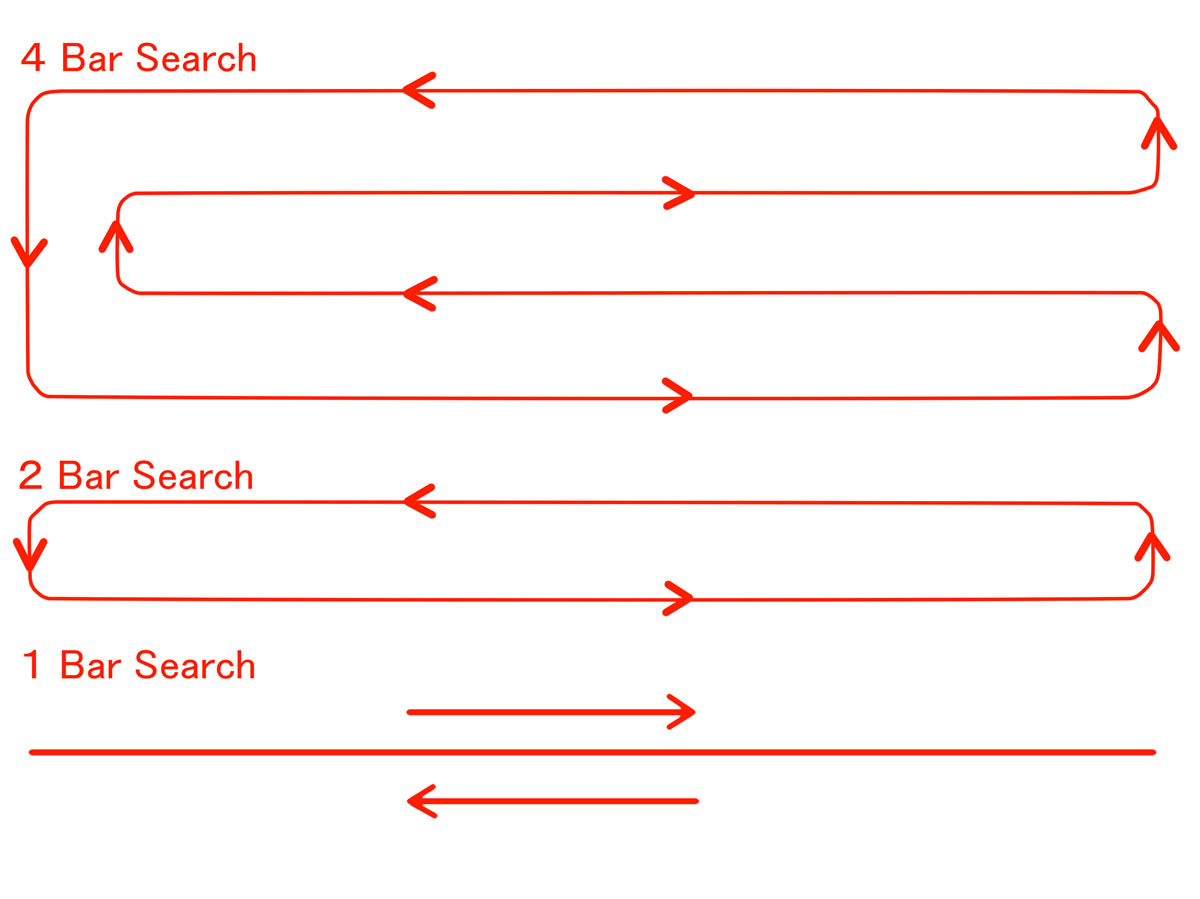
この図のいちばん上に4Bar Searchってパターンで走査線が4回動きます。
その為パターン履歴が残って4機映っているように見えるだけで
これを1Bの1Bar Searchにすれば履歴が少なくなるので見やすくなります
ただ、単機など機数が少ない場合は履歴が4つの履歴が残したほうが
どの方向に向かっているかを視覚的に判断できる利点はあります

そして中央の線がHorizon Lineです
このマークがACQ(Acquisition Cursor)で右にある数字がレーダービームの
上限の高度と下限の高度を示しています
ただし表示されている高度以外は検出しない為完全な索敵を行う場合は
レーダーアンテナを上下に動かす必要があります

このマークがステアポイントです
このRWS画面は広域に散在している敵の情況を素早く把握するのに適しています。
敵を発見するだけ?
それでは敵の索敵とそれをターゲットする方法を見ていきたい思います

真正面から向かってくるのでレーダスコープのタイムラグが発生しない様に
レーダ方向をA1の前方10度に固定します。
レーダスキャンバーの走査線を1Bとスキャン幅を狭くしています

まずレーダ反射面積が大きいA-50メインステイ早期警戒機は胴体面積そして
巨大なレードームの影響で80nm付近で捕捉出来ました。
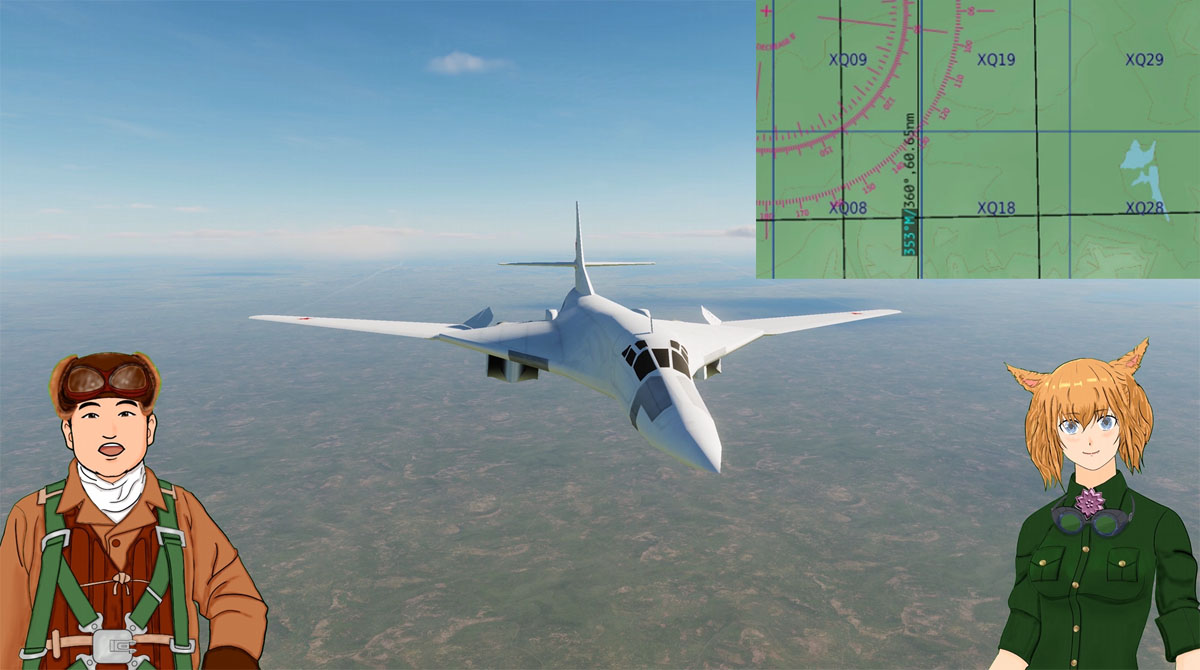
そして次は大型爆撃機Tu-160ブラックジャックは機体が大きい割にはホッソリしたスタイルなので60nmで捕捉しました

そして戦闘機はミグ29フルクラムは50nmで捕捉しました
AN/APG – 68は有効レーダ範囲は70nmとマニュアルには書いてありますが機体が大きければ遠くまで捕捉できますが小型機はやはり50nmと接近しないと難しいようです
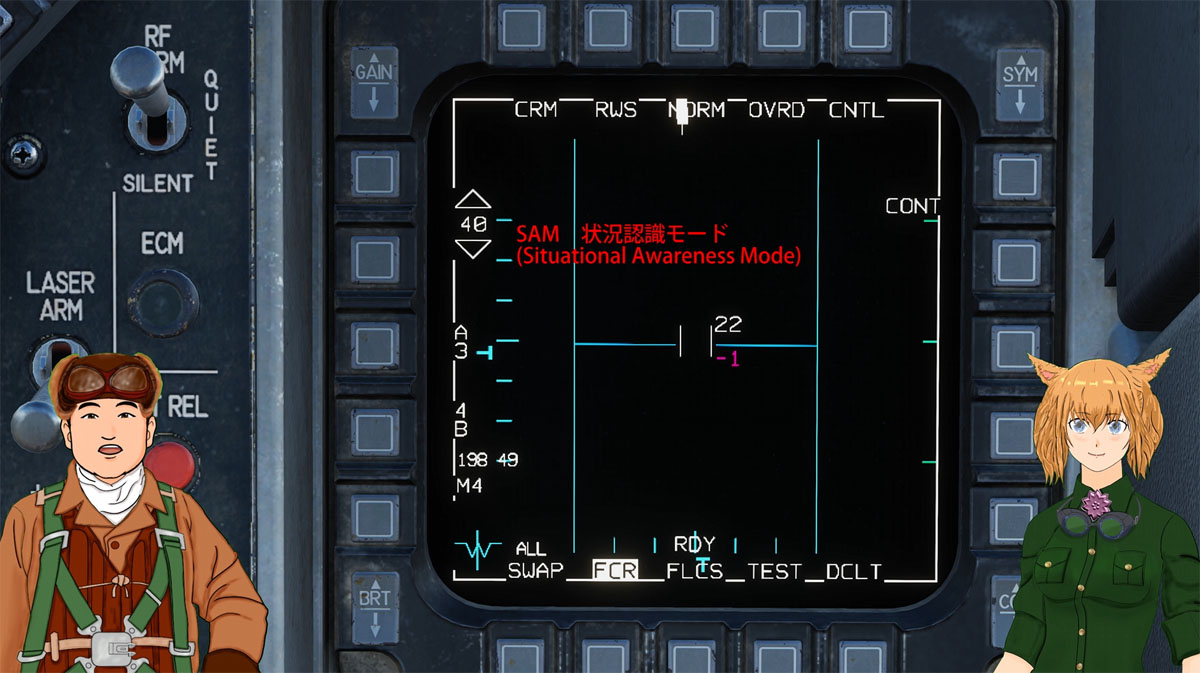
最初にSAM(Situational Awareness Mode)状況認識 モードを説明します

操作は簡単です
このターゲットシンボルにACQカーソルを合わせてからターゲット管理スイッチの上を短く押しますキーボードでは右CntlとUPですがよく使うのでフライトスティックに割り当てるボタンがあればそれに割り当てたほうが楽です
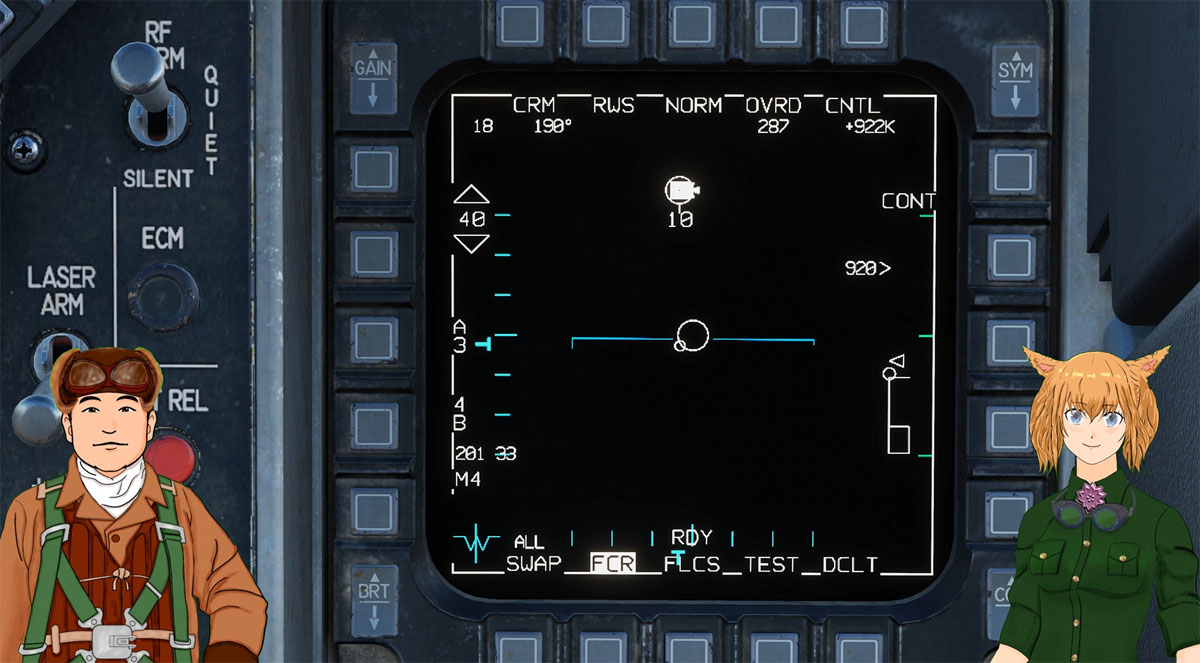
ターゲットシンボルに円が表示されバグの設定が出来ました。
バグって何?
盗聴するって意味もあるんだけど虫と言う意味もあり
例えば羽虫が顔の周りをブンブン飛んでいる時に目障りで叩きたくなるよね
優先的に叩き落としたと言う意味合いの方が強いと思うよ
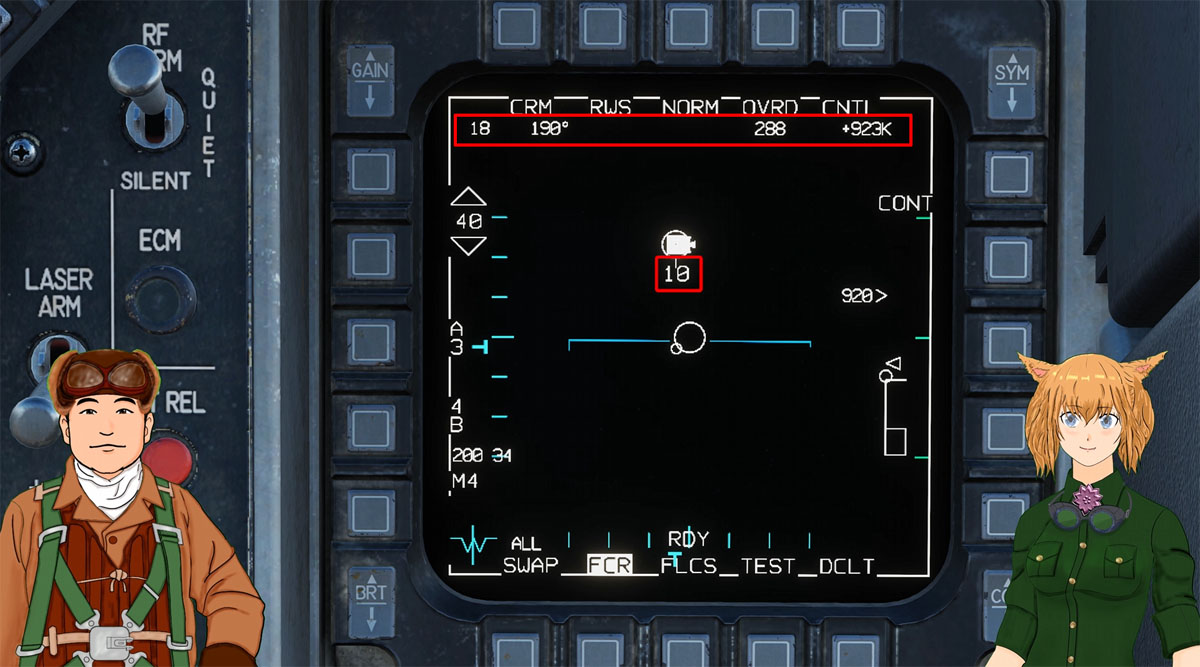
バグターゲットは継続的に監視対象になります
円の下の数字はバグターゲットの高度
画面上部にはバグターゲットの情報が表示されています
アスペクト角 方位 対気速度 接近速度
細かい解説は割愛します
さては解んないんでしょうꉂꉂ(ᵔᗜᵔ*) あはは〜
あらバレちゃった

ヘッドアップディスプレイには次のように表示されます
このマークがバグターゲットのステアリングキューでFの値は角度を表示しています

バグターゲットのデジグネータボックスを表示します
もしこの様に四角だけの表示の場合はマスターモードボタンAA空対空モードボタンを押すとデジグネータボックスに菱形のマーカーが表示されます
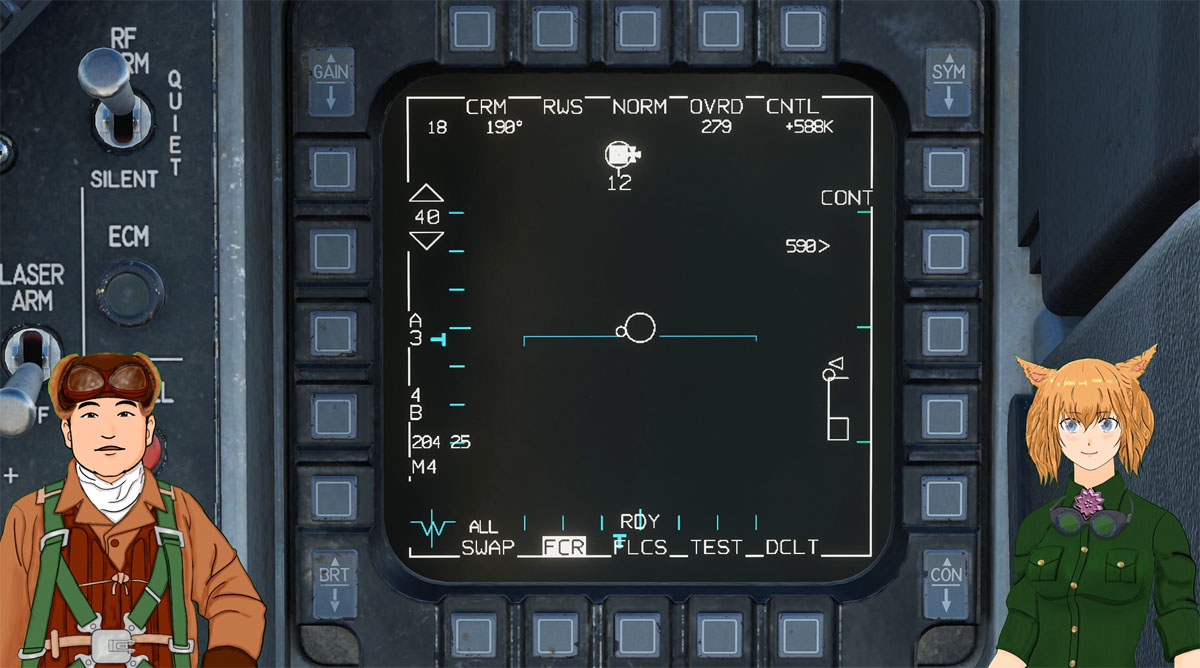
次にSTT(Single Target Track)を説明します
これは単一ターゲットを継続的にスキャンするので従来のロックオンと同様で
レーダの更新レートが非常に高く空対空誘導を行うのに必要な機能を提供します
メインモードがCRMでサブモードをRWSになっている事を確認します
やり方は先ほどと同じようにターゲットシンボルにACQカーソルを合わせてから
ターゲット管理スイッチの上を2回素早く押します
こうすることによりターゲットシンボルがバグ設定されロックされます
あれ?さっきのSAMと何が変わったの?
そうだね 単機だとその違いが分かりずらいので
複数の機体を置いてみますACQカーソルを合わせてからターゲット管理スイッチ
の上を1回だけ押してみます
ターゲットにバグが設定されますが他のターゲットも表示されます
そしてターゲット管理スイッチの上を2回押してみます
そうすると他のターゲットは消えて今選択しているバグターゲットだけ残ります
STTは単機だけの捕捉SAMはRWSとSTTの間のハイブリッドモードと言えます
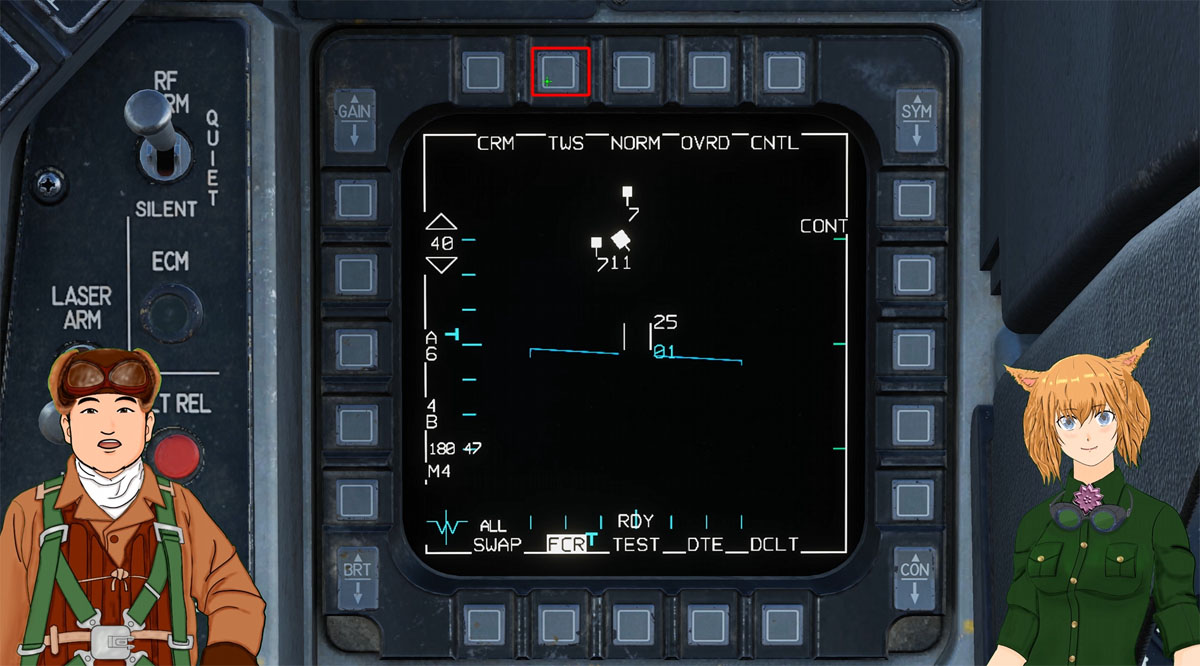
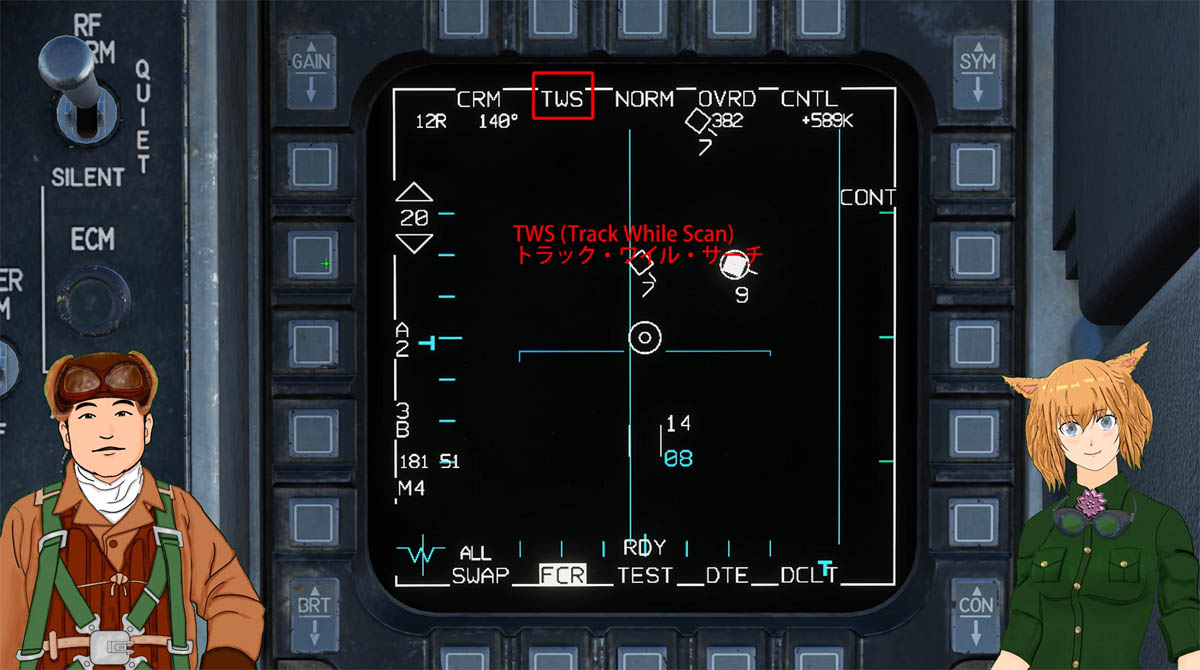
次にTWS (Track While Scan)を見ていきます
TWSは複数のターゲットを迅速に攻撃するのに強力な機能があります
トラックファイルを高い更新レートで維持でき方位角などのスキャンボリュームを制限し自動スキャンセンタリングを行うことによりミサイルにデータリンクを行います
FCRページでレーダーサブモードセレクタをTWSを設定します
このボタンを押してTWS (Track While Scan)にします
またターゲット管理スイッチを右に長く押すことによりRWSモードをTWSモードを切り替えます
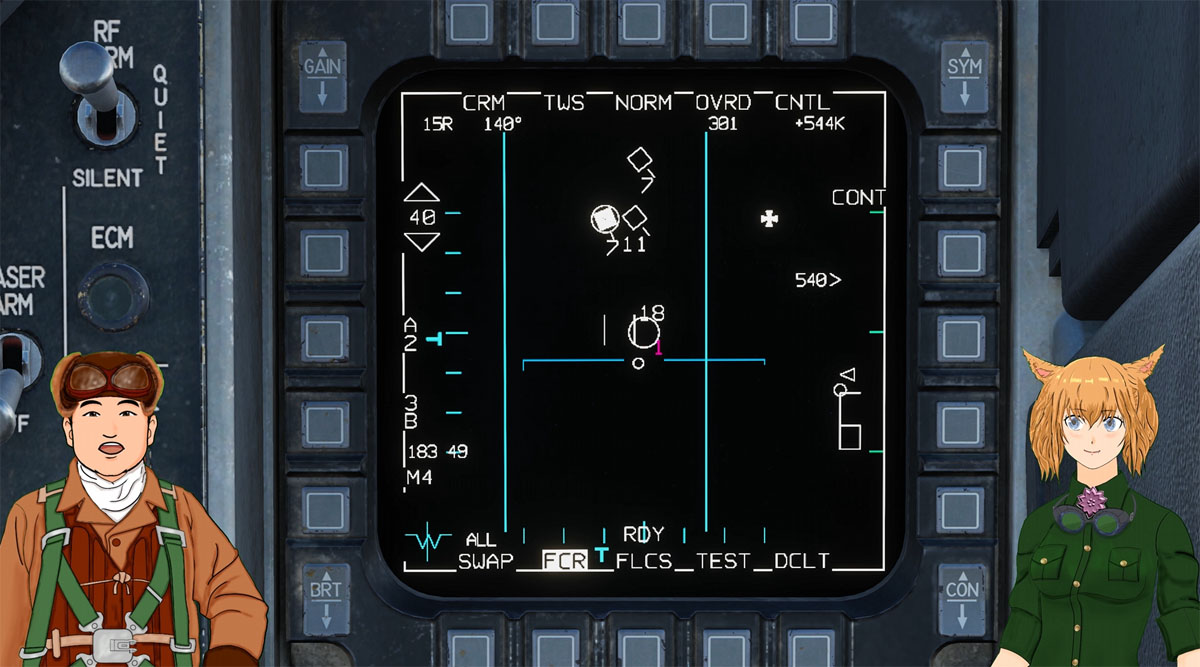
今表示しているのがTWSモードでの表示です
そしてこれが検索対象で黒く塗りつぶされている四角がありますが小さく状態から少し大きな四角に変化します
それがターゲットを追跡している状態になったのでその状態でシステムターゲットに選択できます
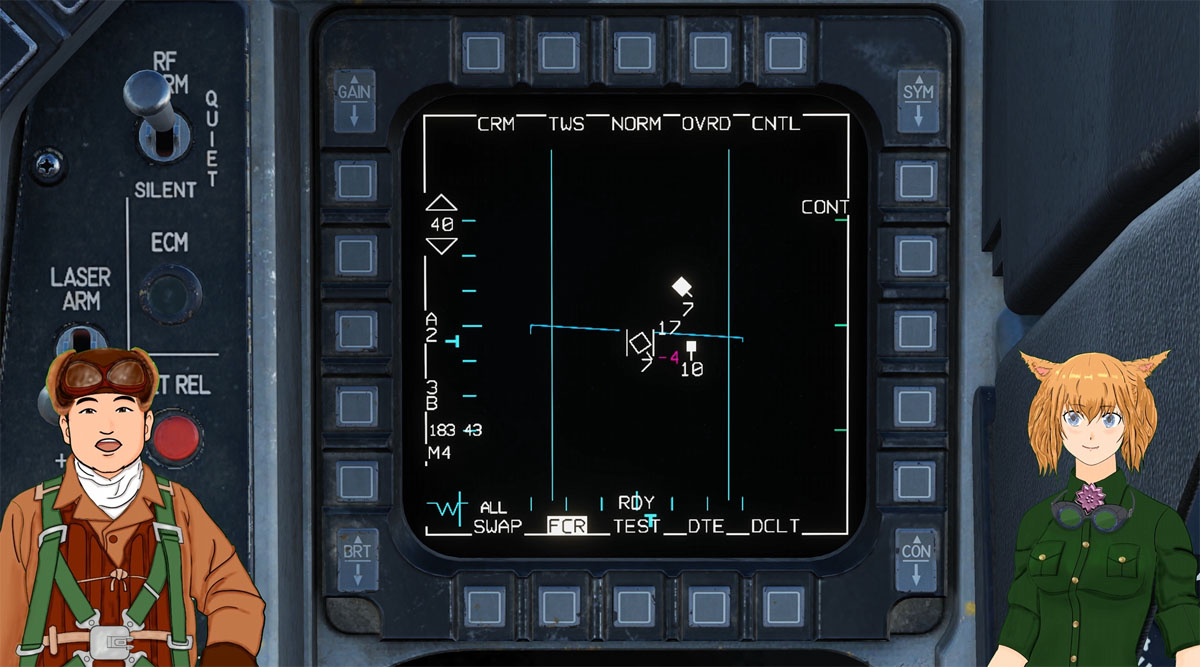
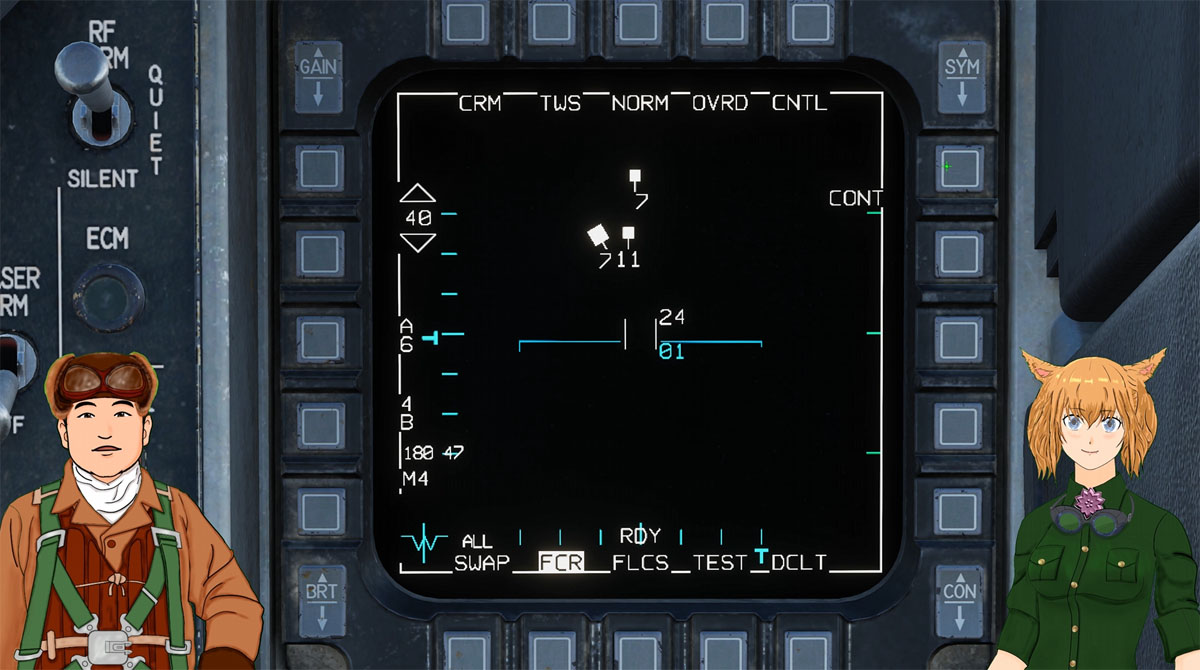
システムターゲットに選択は2つの方法があります
ACQカーソルを合わせてターゲット管理スイッチの上を1回押すことにより四角が塗りつぶされていない状態に変化します
この状態がシステムターゲットですそれぞれ個別に選択するか
システムターゲットがされていない状態でターゲット管理スイッチを右に
一回倒すことにより全てのターゲットをシステムターゲットにできます
その状態でターゲット管理スイッチの右を押すことにより次々と
システムターゲットを選択できます
ターゲットにバグ設定しミサイル発射し続けてシステムターゲットで選べる
状態なのでバグ設定しまたミサイルを発射するなど連射が可能です

しかもこの方式だとSTTの場合はターゲットを設定した時点でロックオンしたことが相手に通知されてしまうがこの方式だとバグ設定の時点では相手にロックオン
されたことが通知されず

敵パイロットが気づくにはAIM-120 アムラームミサイルの
アクティブレーダーシーカーがターゲットに接近した時に作動するので
その時にロックオンされたことに気づき回避が遅れる可能性が高くなります
今回のCRM複合レーダモードの解説は如何でしたでしょうか?
次回は近距離の空対空戦闘に使用するACMモードを解説します
また今回の操作方法はYouTubeで配信していますのでそちらを見てもらった方が全然分かりやすいと思いますのでYouTubeのモッキーのエースパイロットも是非よろしくお願いします