
ひよっこパイロットが撃墜王を目指すmokkyのエースパイロットを見て頂き誠に有難うございます。
今回もゲームDCS Worldでウクライナ空軍仕様のF16戦闘機の操作方法を学ぼうという企画の第2弾
飛行機に重要な計器の見かた
を一緒に学んでいきたいと思います。

計器を説明する前にミッション エディターで今回の飛行ルートを設定します
ウクライナ南部クリミア半島を1周しながらのフライトです
かなり挑発的なルートじゃないの?
一応操作方法の説明だから敵機や敵地対空ミサイルなどは配備していないので
のんびりとした飛行になります
何でミッションエディターで飛行ルートを設定したの?
操縦桿を操作しながらの説明って結構大変なんだよね
このF-16には待望の自分で決めたコースを通るオートパイロットモードが付いたので最初にその機能を説明します。

オートパイロットにはピッチとロールの2つの機能があります。
右側のスイッチはピッチ 機首の上げ下げに関する機能で中央の位置はオートパイロットが無効になっています。
上のALTホールドはアルチチュード高度ホールドモードで現在の高度を維持します。
下にスイッチを下げATTホールドにするとピッチ ホールドモードで現在のピッチ角度を維持します。
共にキーバインドはされていないで自分で適当なキーを設定するかマウス操作で行います。

続いて左側のロールに関してのスイッチを説明します。
今設定されている中央のATTホールドは右スイッチでオートパイロットをオンにすると機能し現在のロール姿勢を維持します。
上のDDG-SELは機首方位選択モードで

EHSI電子水平状況表示器のヘディングマーカーで設定した方向に機首を向けます。
ヘディングマーカーは左側のダイヤルのHDGセットノブをマウスで回すことによりヘディングマーカーを動かすことができます

下のSTRG-SELはステアリングセレクトモードで先ほどミッションエディターで設定したステアポイントに向けて機首を向けます。

DEDデータ入力ディスプレイに表示されているSTPT1はステアポイント1を示し
次のステアポイント2をセットします。

ICP 統合制御パネルのDEDインクリメントデクリメントスイッチを上にすることで次のステアポイント2にセットできます。

そうすると設定したステアポイントに向けて機首をその方向に動かします
これで手放し運転が出来るよね
オートパイロットって言ってね
その表現だとなんか道路交通法違反に聞こえるから(;^ω^)

次にヘッドアップディスプレイの表示を説明したいと思います。
なんかごちゃごちゃして分かりにくいよね
そうだね表示シンボルが何を示すか分からなくても結構飛びちゃったりもしますが意味がわかると飛行がより楽しくなると思いますので説明しますね。

上からボアサイトクロス
照準方向を示します。

グレートサークル ステアリングキュー
キューが伸びている線は選択したステアポイントがどの方向にあるかを示しています。
今真っ正面にステアポイント2があることがわかります。

飛行経路マーカーFPMは飛行機の慣性速度ベクトルを示し常に中心点に固定しているわけではなく例えば強い横風で機体が流されているとか機体の横滑りによる横方向のベクトルの他機首の上げ下げによる縦方向への動きにも合わせてFRMが動きます。

ただしICP統合制御パネルのドリフトカットアウトに位置を合わせると常に中心点に固定します。

これは飛行機にかかっているGを示します。

水平線を示すHorizon Lineです。

ダイヤモンドシンボルがステアポイントの3次元位置を示しています。
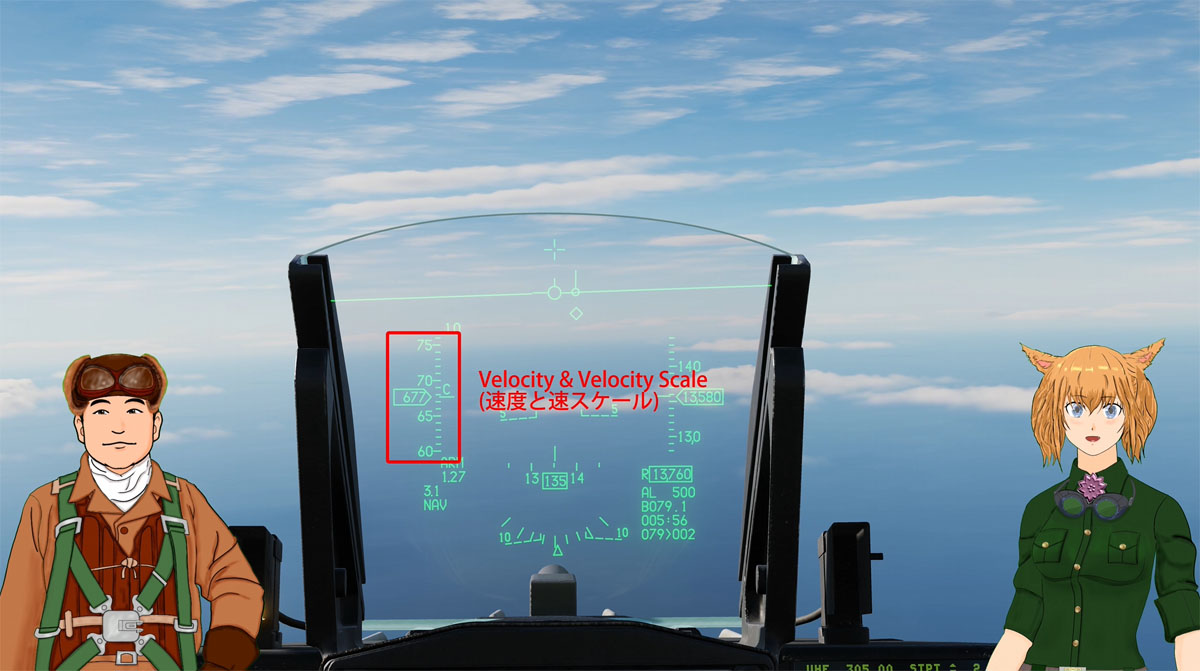
速度と速度スケールです。
数字の横にCって書いてあるけど?
Cは校正大気速度CAS
Tは真大気速度TAS
Gは対地速度を示しています。

ARMはコックピット左側にあるマスターアームスイッチが上のマスターARMに設定されていて武器が使用できる状態です。

マッハ数

最大G

マスターモードステータス
現在はナビと表示されているのはナビゲーションモードを示しています。
他にも状況によりこのステータスが変わりますが必要に応じてその都度説明します。

アティチュードバー
機体のピッチ角を示し
実線はプラスのピッチ角
破線はマイナスのピッチ角になり角度は5度単位の表示になります。

方位スケール

ロールインジケーター
機体を傾けるバンク角度を10度・20度・30度・45度の目盛りで表現します。

先ほど説明しましたグレートサークルステアリングキューと合わさったらステアポイントに真っすぐ向かっていることを示します

左の数字が次のステアポイントまでの距離をノーティカルマイルで表示し
右側の数字はステアポイント2を示しています。

次のステアポイントまで現在の速度での想定時間を示しています。

スラントレンジは現在のターゲット
今は次のステアポイントまでの距離を示しています。
頭のアルファベットBって何?
頭のアルファベットは決定方法を示していて
Bは気圧高度とステアポイント高度で決定し
Rはレーダー高度計で決定
FはFCR火器管制レーダーからの測距データで決定し
Mは手動レンジで空対空モードまたは空対地CCIPモードの場合で使用されます。
そこはまた兵装編でお伝えしようと思います。

最低高度設定で高度500フィート 152mを下回ったら警告メッセージが流れます。

レーダー高度計
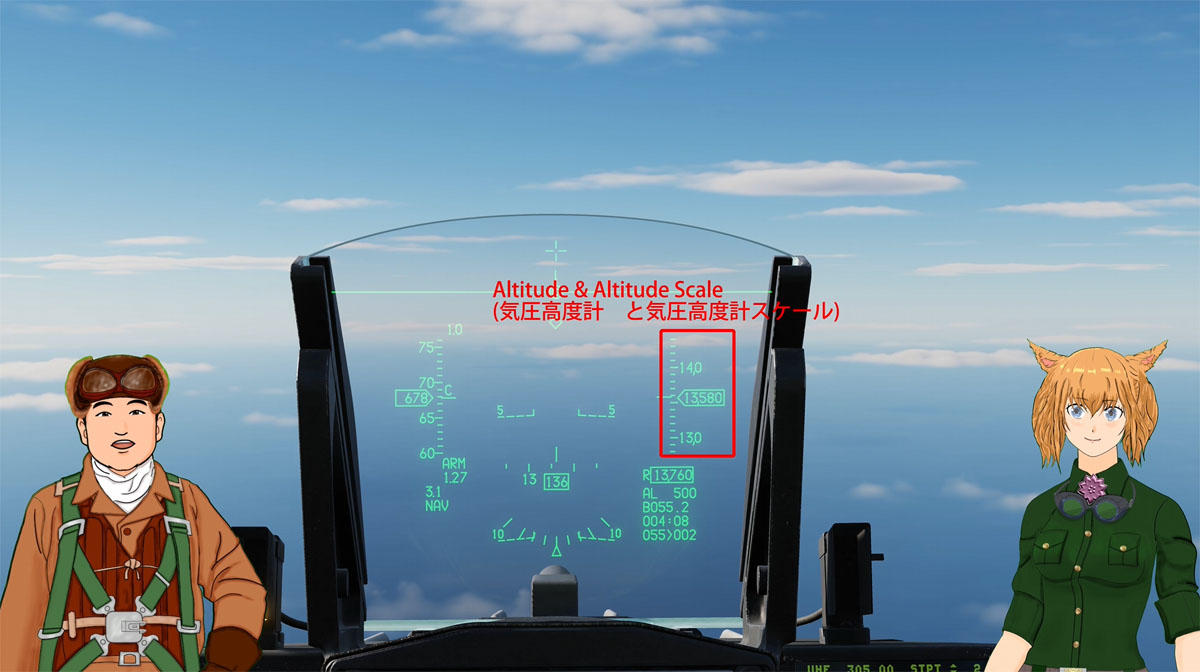
気圧高度計と高度スケール
なんでレーダー高度計と気圧高度計を二つ表示しているの?
レーダー高度計は電波高度計とも言われて自分の機体から地面に向かって電波を
発信して戻ってきた時間を測定し高度を測るので気圧高度計に比べて正確な高度が出せるんだよね

じゃあ気圧高度計なんかいらないじゃん!
まあそうとはいかないんだよね
例えば今飛んでいる高高度だと表示しなくなったでしょ
また激しく機体を動かすと同じようにレーダー高度計が表示しなくなります。
主に低高度の着陸用に使用する高度計なんだよ。

次にHUDヘッドアップディスプレイ コントロールパネルを使ってHUDシンボル要素を自分好みの設定に調整します。

最初に全ての表示スイッチをオフにした状態がこの表示で最低限の情報が表示されています。

左からスケールスイッチを真ん中のVAHの位置にすると速度・高度・方位スケールが表示されます。

上のVV-VAHの位置にすると
垂直速度と速度・高度及び方位スケールが表示されます。

次に飛行経路マーカースイッチの真ん中のFPMの位置にすると
飛行経路マーカーとステアリングキューが表示されます。

上のATT/FPRの位置にすると
姿勢制御バーと飛行経路マーカー及びステアリングキューが表示されます。

次にDED/PFLDスイッチの真ん中のPFLの位置にすると

パイロット 障害リストディスプレイに表示された内容がヘッドアップディスプレイに表示されます。

上のDEDデータの位置にすると

DEDに表示された内容がヘッドアップディスプレイに表示されます。

次に手動レチクルスイッチを真ん中のPRIの位置にすると
プライマリーレチクルと手動レチクルの押し下げ設定が表示されます。

上のスタンバイの位置にすると
スタンバイレチクルとマニュアルレチクルの押し込み設定が表示されます。

下の速度表示スイッチを説明します。
上からCAS校正大気速度
真ん中がTAS真大気速度
一番下が対地速度です。
あとは高度スイッチ
明るさ制御スイッチ
テストスイッチなどがありますが操作は割愛します。

最後に主要の計器の説明をして今回は終了になります。
説明していないところは必要に応じてその都度説明しますのでF16戦闘機のシリーズを通して見てもらえるとF16の機能を把握できると思います。
うまく宣伝ぶっこんできたね
スタンバイ姿勢インジケーターは飛行機のピッチとロールのみを表示する内蔵型姿勢インジケーターです。

①大気速度とマッハインジケーター
外側のスケールは速度をノットで表現して内側のスケールはマッハ計になります。
②高度計
③迎え角インジケーター
④姿勢ディレクターインジケーターは
慣性航法システムによって提供される航空機のピッチとロールの姿勢を表示します。
⑤垂直速度インジケーター

方位磁針
燃料インジケーター

システムA/B油圧インジケーター

EPU非常用電源ユニット燃料インジケーター
機内与圧

最後に紹介するのは時計です

今回のコックピット計器類の解説は如何でしたでしょうか?
まだ伝えたい内容はいっぱいありますがこれ以降もF16操作編は続きますのでその都度解説したいと思います。
次回は今回解説していないICP統合制御パネルとMFDマルチファンクションディスプレイあたりを解説していきたいと思います
また今回の操作方法はYouTubeで配信していますのでそちらを見てもらった方が全然分かりやすいと思いますので
YouTubeのモッキーのエースパイロットも是非よろしくお願いします